
Scharmdynamik
Analyse von lokaler verteilter Strategien für Schwärme mobiler Roboter mittels Methoden der dynamischen Systeme.
On the Dynamical Hierarchy in Gathering Protocols with Circulant Topologies
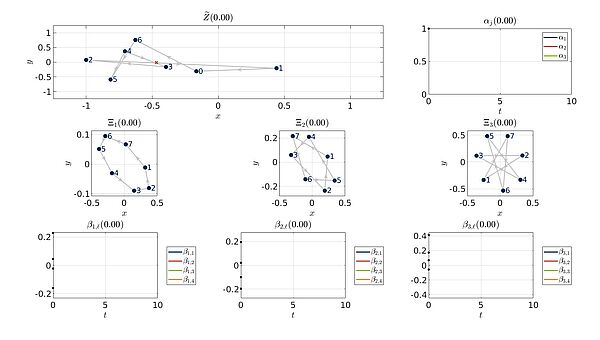
In this article we investigate the convergence behavior of gathering protocols with fixed circulant topologies using tools form dynamical systems. Given a fixed number of mobile entities moving in the Euclidean plane, we model a gathering protocol as a system of ordinary differential equations whose equilibria are exactly all possible gathering points. Then, we find necessary and sufficient conditions for the structure of the underlying interaction graph such that the protocol is stable and converging, i.e., gathering, in the distributive computing sense by using tools from dynamical systems. Moreover, these tools allow for a more fine grained analysis in terms of speed of convergence in the dynamical systems sense. In fact, we derive a decomposition of the state space into stable invariant subspaces with different convergence rates. In particular, this decomposition is identical for every (linear) circulant gathering protocol, whereas only the convergence rates depend on the weights in interaction graph itself.
Kontakt: Raphael Gerlach und Sören von der Gracht